|
I recently completed my PhD in Robotics at Institute for Robotics and Intelligent Machines , Georgia Tech (GT), advised by Prof. Daniel I. Goldman. I am a member of Complex Rheology And Biomechanics (CRAB) Lab, my current research focuses on biologically inspired limbless and legged robot locomotion in complex environments. My research interests include bio-inspired robots and their robophysical model developing, locomotion principle and mechanics modeling, and geometric and dynamic motion planning and control. Prior to this, I received my Master degree in Mechanical Engineering from Carnegie Mellon University (CMU), advised by Prof. Howie Choset. I was a member of Biorobotics Lab, working on motion planning and compliant control for snake robot locomotion. I received my BS degree in Electrical and Computer Engineering from the University of Michigan-Shanghai Jiao Tong University Joint Institute, Shanghai Jiao Tong University (SJTU). I was a member of Soft Robotics and Biodesign Lab, led by Prof. Guoying Gu. Email / CV / Google Scholar / LinkedIn / YouTube / Follow @robotianyuwang |

|
|
[2025/11] I am grateful to announce that I successfully defended my PhD thesis on November 26, 2025! [2025/9] Excited to be awarded the Topping Fellowship again from GT ME School! [2025/5] Had some wonderful time at ICRA! Successfully held the mechanical intelligence workshop. Had 4 co-authored papers presented. [2025/3] Proud to receive the Ph.D. Research Excellence Award from GT ME School! [2025/3] Excited to be awarded the Topping Fellowship from GT ME School! [2025/3] Excited to receive the 2025 APS Graduate Research Excellence Travel Award! [2025/3] Honored to be selected as an NSF CPS Rising Star! Excited to attend 2025 CPS Rising Stars Workshop. |
|
(*equal contribution) |
|
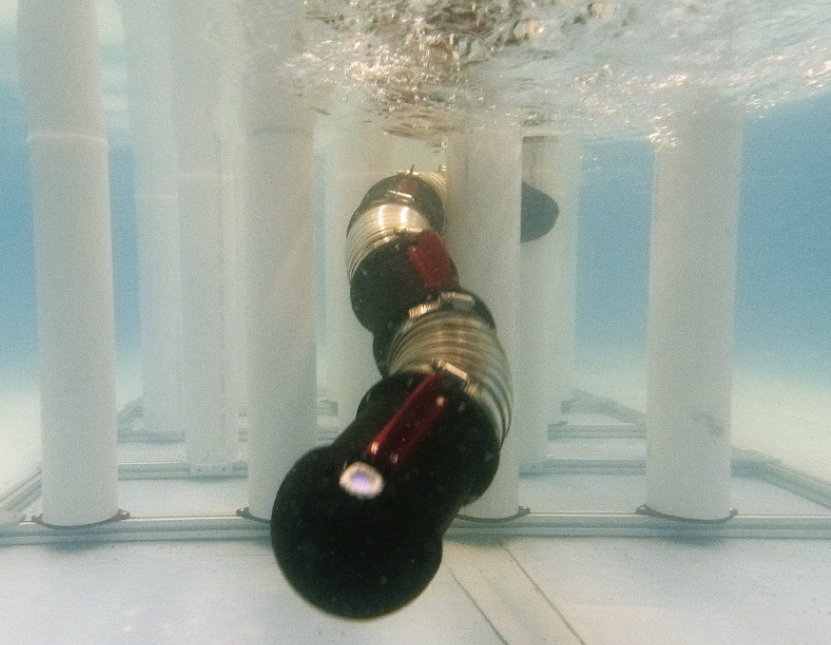
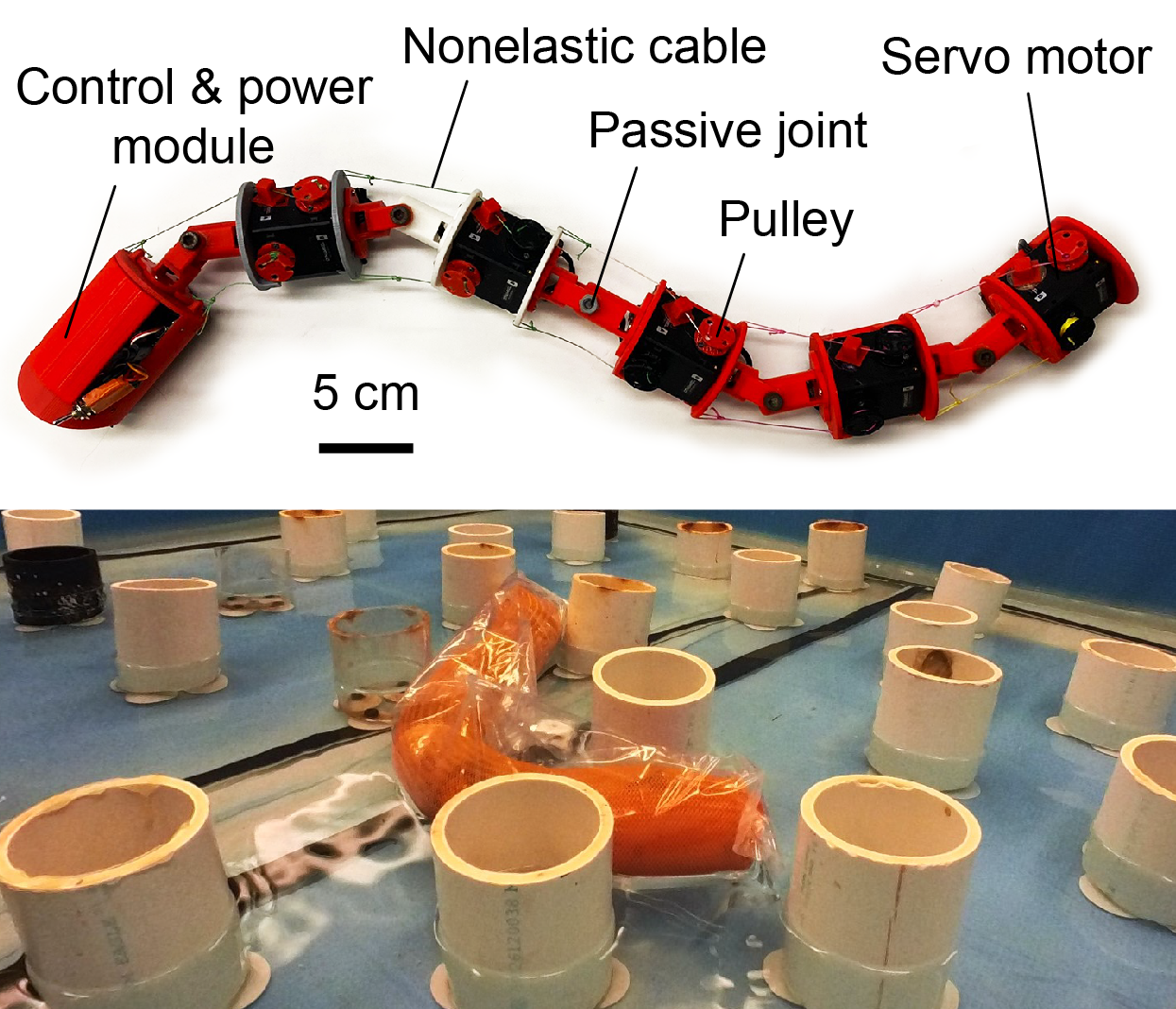
Matthew Fernandez*, Tianyu Wang*, Galen Tunnicliffe, Donoven Dortilus, Peter Gunnarson, John O. Dabiri, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2025 pdf / video / arxiv / This work presents AquaMILR+, an untethered, fully waterproof limbless robot that combines bilateral cable-driven actuation and a novel syringe-based depth control system to achieve agile undulatory swimming, turning, and obstacle navigation in cluttered 3D aquatic environments. |
|
Tianyu Wang*, Nishanth Mankame, Matthew Fernandez, Velin Kojouharov, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2025 pdf / video / arxiv / This work introduces AquaMILR, an untethered limbless swimming robot with bilateral cable-driven actuation and programmable body compliance, showing that mechanical intelligence enables emergent obstacle navigation in cluttered aquatic environments, while a decentralized feedback controller extends performance at higher frequencies by integrating computational intelligence. |
|
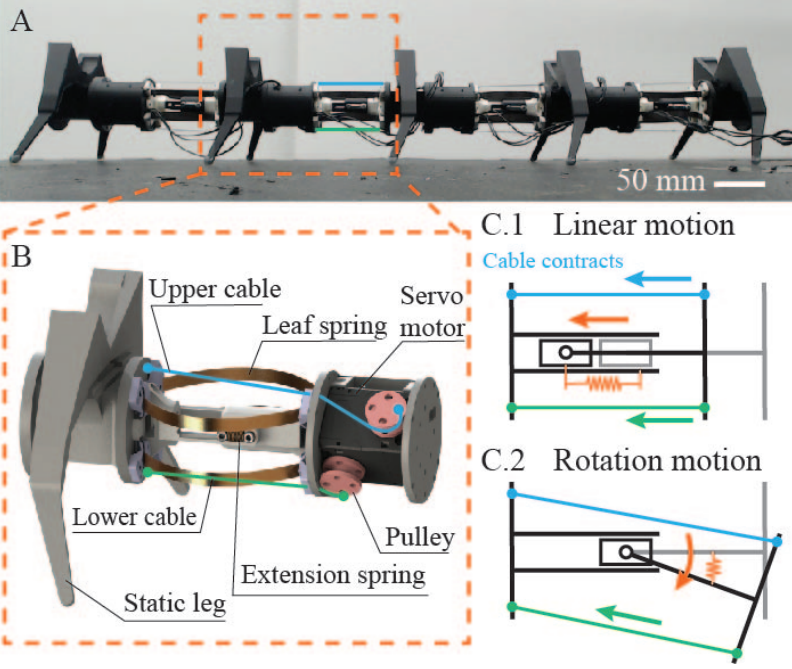
Massimiliano Iaschi, Baxi Chong, Tianyu Wang, Jianfeng Lin, Juntao He, Daniel Soto, Zhaochen Xu, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2025 pdf / video / arxiv / This work shows that adding a phase-synchronized peristaltic body wave to a cable-driven, multi-legged robot substantially boosts obstacle-climbing and traversal on rugose terrains, improving robustness and efficiency beyond vertical-wave-only gaits. |
|
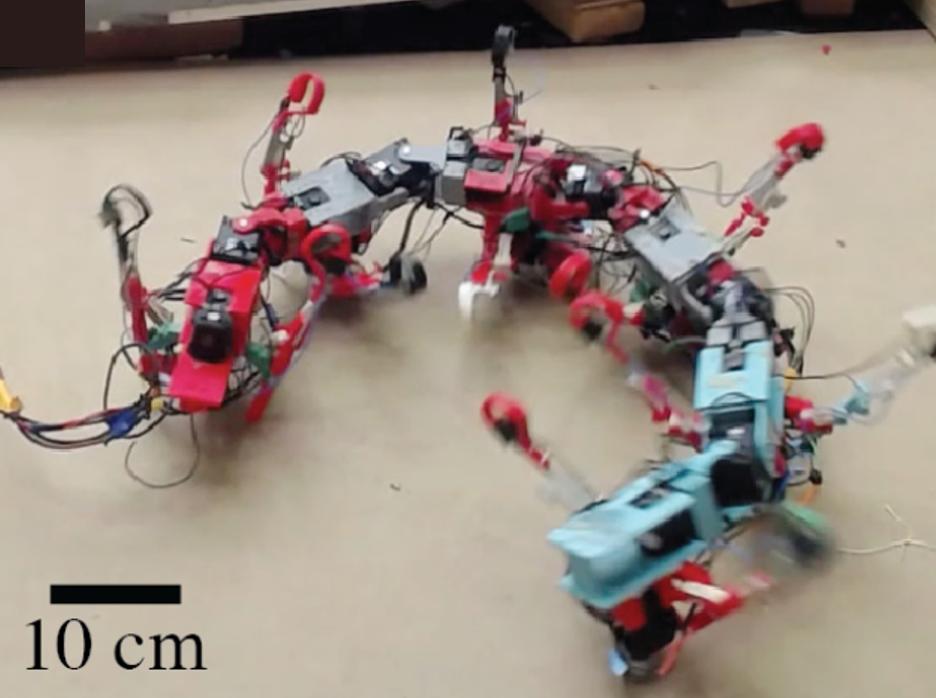
Erik Teder, Baxi Chong, Juntao He, Tianyu Wang, Massimiliano Iaschi, Daniel Soto, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2025 pdf / arxiv / This work develops and validates general self-righting strategies for centipede-like robots by combining biological observations with robophysical models, showing that superimposed lateral and vertical body waves enable robust recovery from tipping, thereby enhancing mobility and robustness on complex terrain. |
|
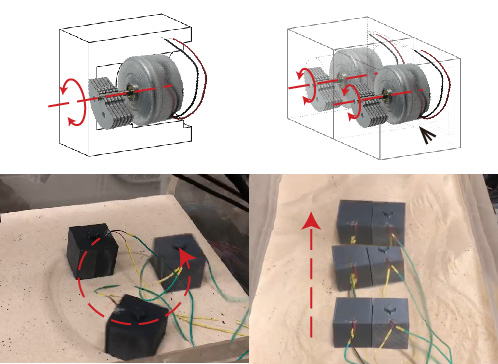
Bangyuan Liu*, Tianyu Wang*, Deniz Kerimoglu, Velin Kojouharov, Frank L. Hammond III, Daniel I. Goldman Frontiers in Robotics and AI, 2024 pdf / video / arxiv / This work explores how simple vibration-based mechanisms enable robust locomotion on granular terrains. This research presents a minimalistic yet highly effective design—a cube-shaped robot that propels itself via self-vibration, offering insights for simple robotic locomotion methods in harsh environments. |
|
Velin Kojouharov*, Tianyu Wang*, Matthew Fernandez, Jiyeon Maeng, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2024 pdf / video / arxiv / This work incorporates programmable body compliance into the sidewinding gait template and highlights the emergence of mechanical intelligence when the robot is equipped with an appropriate level of body compliance. This allows the robot to locomote more energetically efficiently, and to navigate through terrain heterogeneities all achieved in an open-loop manner. |
|
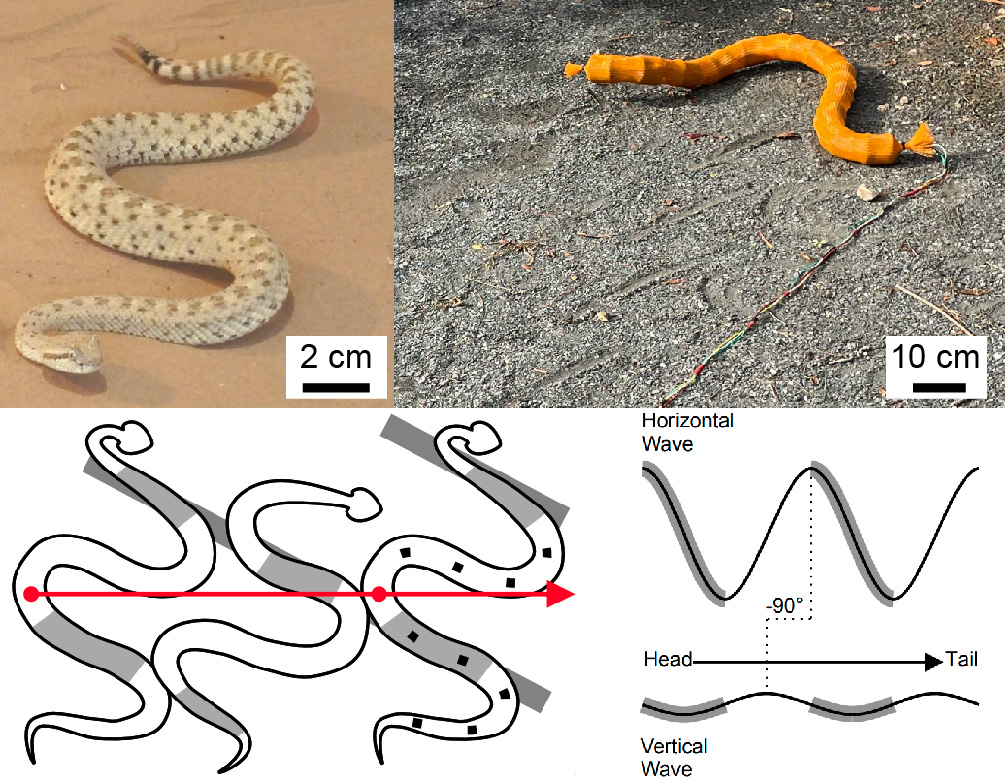
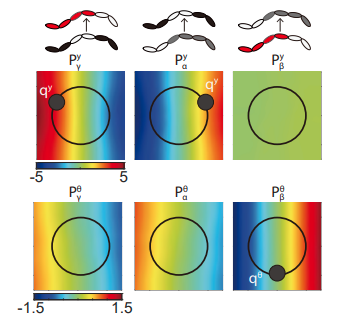
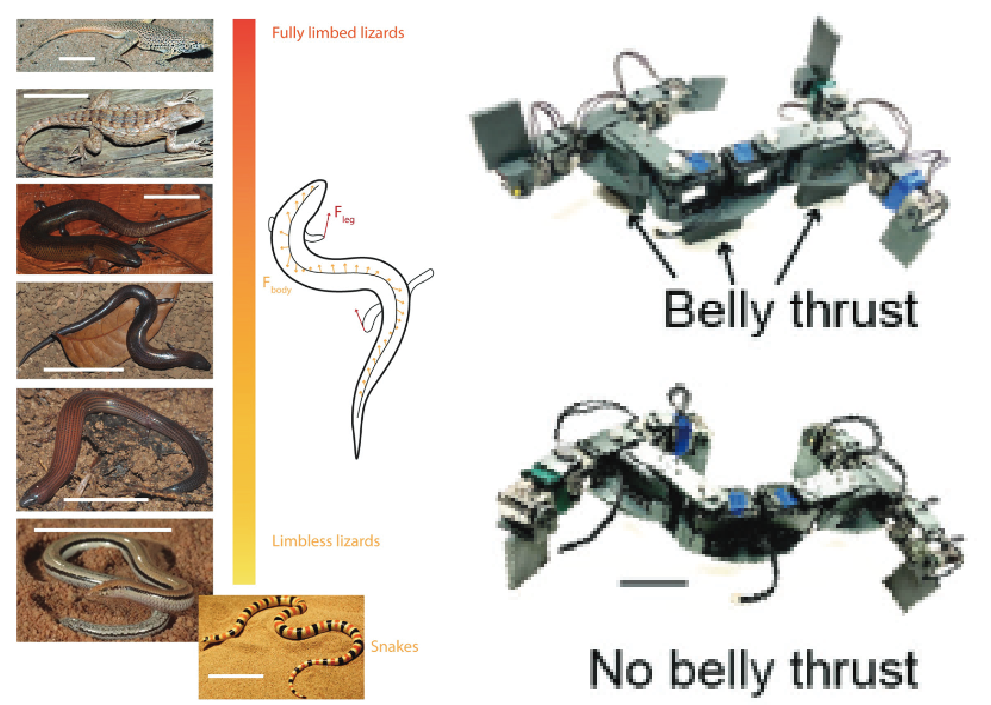
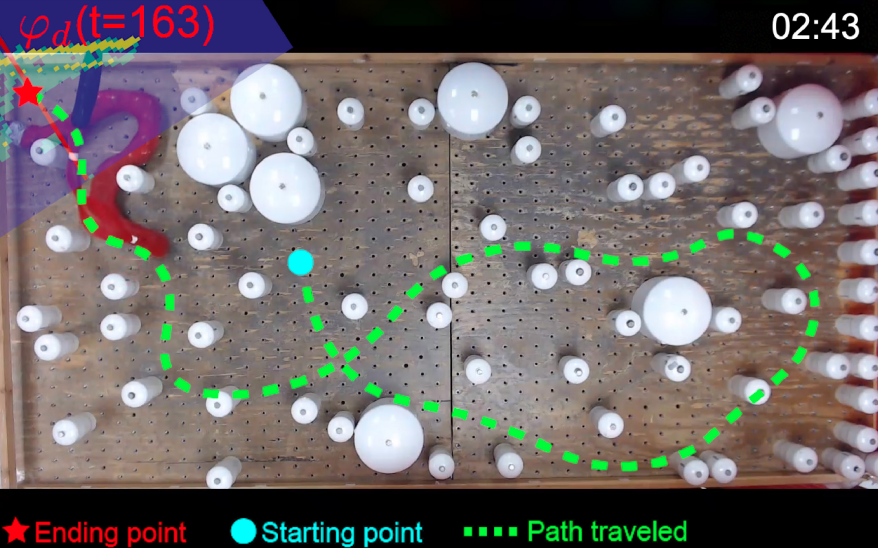
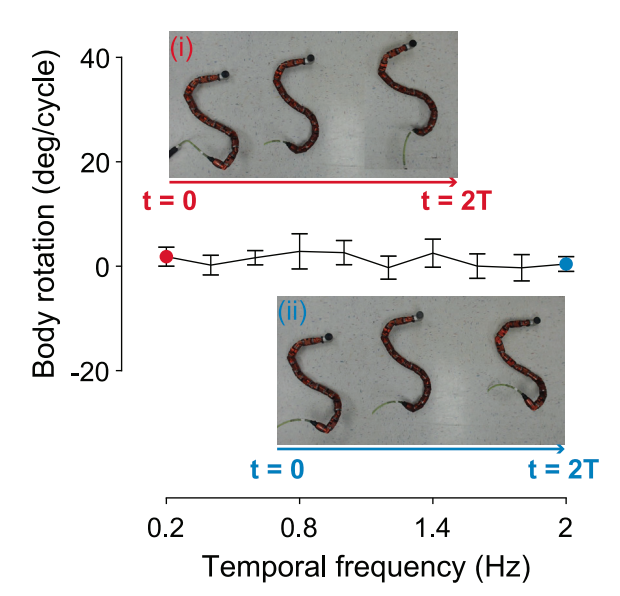
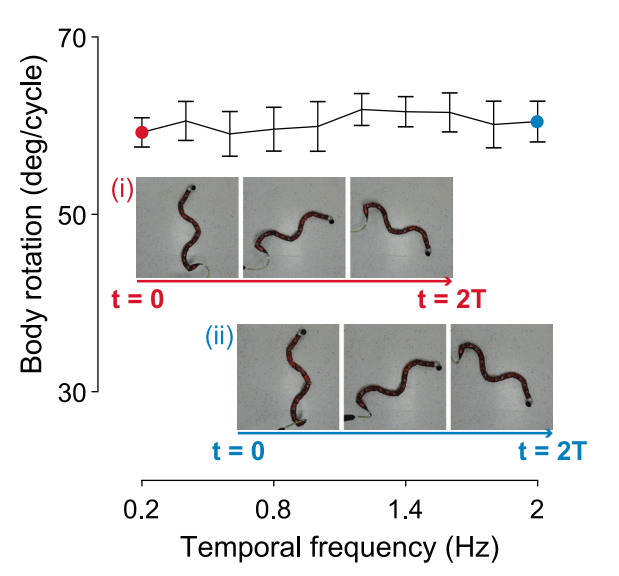
Tianyu Wang*, Christopher Pierce*, Velin Kojouharov, Baxi Chong, Kelimar Diaz, Hang Lu, Daniel I. Goldman Science Robotics, 2023 project page / pdf / supplementary materials / video / arxiv / Research highlight in Nature Reviews Electrical Engineering / News article in The Conversation Article in American Scientist / News article in Georgia Tech Research News Interview article by DeepTech and MIT Technology Review (Chinese) This work conducts a comparative biological and robotic study to uncover principles of how mechanical intelligence aids limbless locomotion in heterogeneous terradynamic regimes, providing insights into how limbless organisms can leverage mechanical intelligence via appropriately tuned bilateral actuation to locomote in complex environments and demonstrating a design and control paradigm for limbless robots. |
|
Baxi Chong, Tianyu Wang, Daniel Irvine, Velin Kojouharov, Bo Lin, Howie Choset, Daniel I. Goldman, Grigoriy Blekherman Robotics: Science and Systems (RSS), 2023 pdf / video / arxiv / This work expands the scope of geometric mechanics to obstacle-rich environments. Specifically, a model that maps the presence of an obstacle to directional constraints in optimization is developed. Thus, novel gait templates suitable for sparsely and densely distributed obstacle-rich environments are identified. |
|
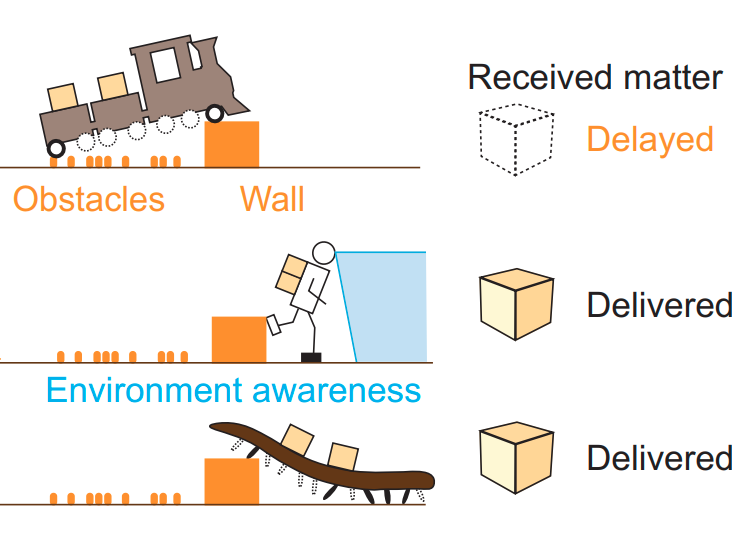
Baxi Chong, Juntao He, Daniel Soto, Tianyu Wang, Daniel Irvine, Grigoriy Blekherman, Daniel I. Goldman Science, 2023 pdf / Locomotion on rough terrain necessitates substantial feedback to adjust stride, and typically involves a network of sensors to detect variations in terrain. Utilizing information theory, this work demonstrates that it is possible to achieve a successful arrival on rough terrain with sufficient redundancy in the body, without the need of heavy environmental awareness. |
|
Baxi Chong, Tianyu Wang, Bo Lin, Shengkai Li, Pranav Muthukrishnan, Juntao He, Daniel Irvine, Howie Choset, Grigoriy Blekherman, Daniel I. Goldman The International Journal of Robotics Research (IJRR), 2023 pdf / Baxi Chong, Tianyu Wang, Bo Lin, Shengkai Li, Grigoriy Blekherman, Howie Choset, Daniel I. Goldman Robotics: Science and Systems (RSS), 2021 Best Paper Award Finalist pdf / This work develops a framework to design, optimize, and analyze contact patterns for limbless and legged robots to generate effective motion in the desired directions. |
|
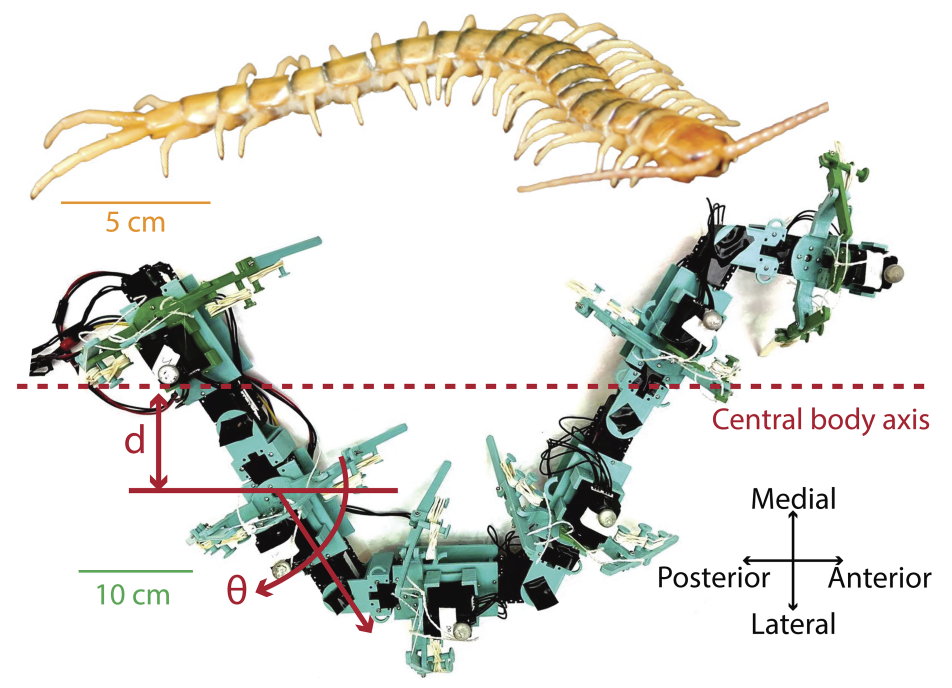
Baxi Chong, Juntao He, Shengkai Li, Eva Erickson, Kelimar Diaz, Tianyu Wang, Daniel Soto, Daniel I. Goldman Proceedings of the National Academy of Sciences (PNAS), 2023 pdf / This work shows that undulatory locomotion with leg retraction/protraction can be recast as a fluid-like problem with the nonlinearities of foot–ground interactions leading to acquired drag anisotropy, facilitating the control of robust robot locomotion in complex terradynamic scenarios and giving insight into neuromechanical control and the evolution of myriapod locomotion. |
|
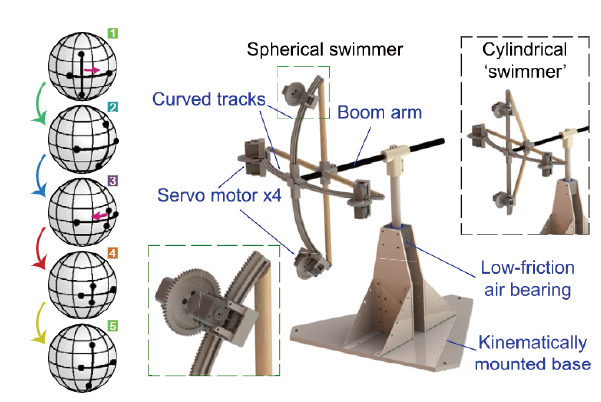
Shengkai Li*, Tianyu Wang*, Velin H. Kojouharov, James McInerney, Enes Aydin, Yasemin Ozkan-Aydin, Daniel I. Goldman, D. Zeb Rocklin Proceedings of the National Academy of Sciences (PNAS), 2022 pdf / This work develops a robot to realize the concept that the noncommutativity of translations permits translation without momentum exchange in either gravitationally curved spacetime or the curved surfaces encountered by locomotors in real-world environments. |
|
Baxi Chong, Tianyu Wang, Eva Erickson, Philip J. Bergmann, Daniel I. Goldman Proceedings of the National Academy of Sciences (PNAS), 2022 pdf / This work uses biological experiments, a geometric theory of locomotion, and robophysical models to investigate body–limb coordination in diverse lizards, valuable in understanding functional constraints on the evolutionary processes of elongation and limb reduction as well as advancing robot designs. |
|
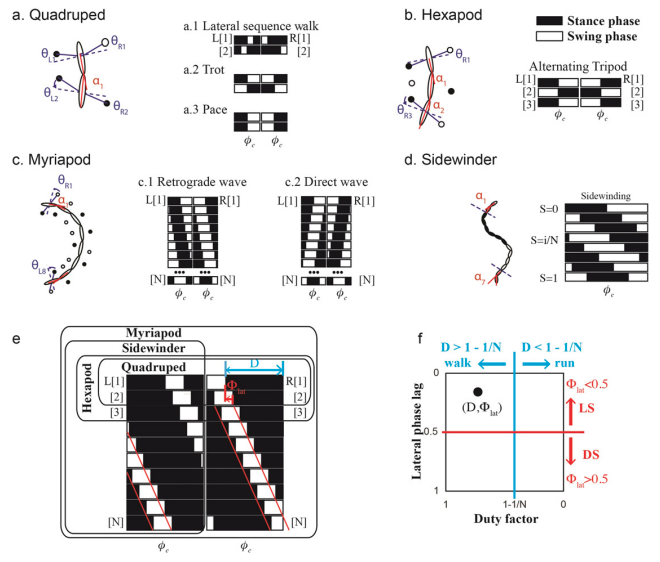
Baxi Chong, Yasemin O Aydin, Jennifer M Rieser, Guillaume Sartoretti, Tianyu Wang, Julian Whitman, Abdul Kaba, Enes Aydin, Ciera McFarland, Kelimar Diaz Cruz, Jeffery W Rankin, Krijn B Michel, Alfredo Nicieza, John R Hutchinson, Howie Choset, Daniel I Goldman Bioinspiration & Biomimetics, 2022 pdf / This work develops a general framework build shape control schemes which can provide baseline patterns of self-deformation (gaits) for effective locomotion for serially connected multi-legged robots across diverse morphologies. |
|
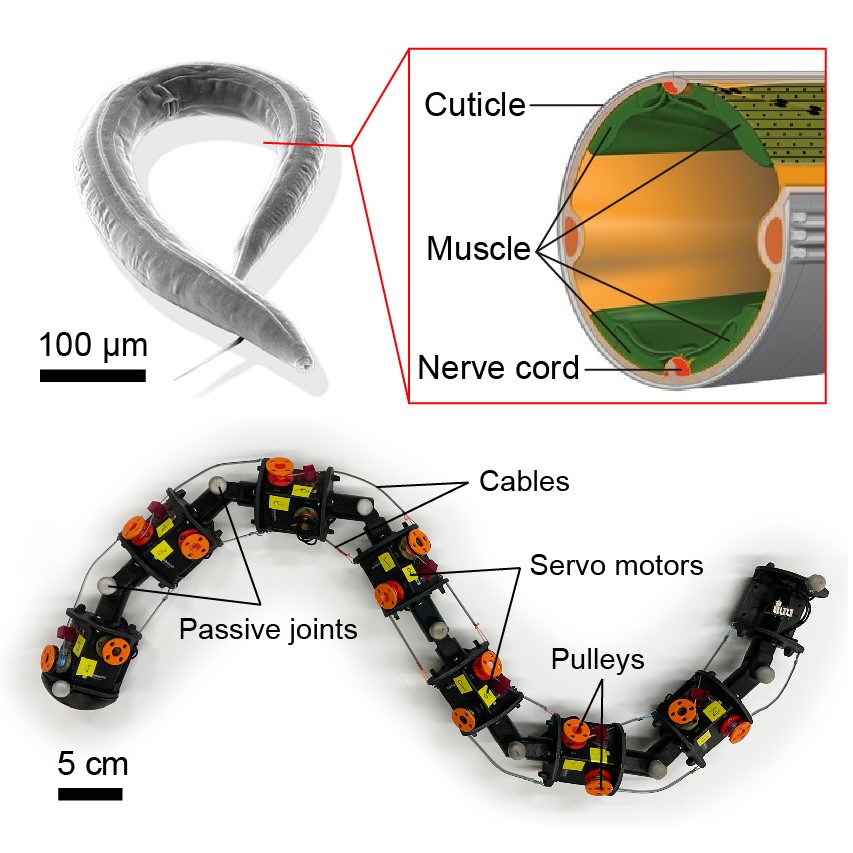
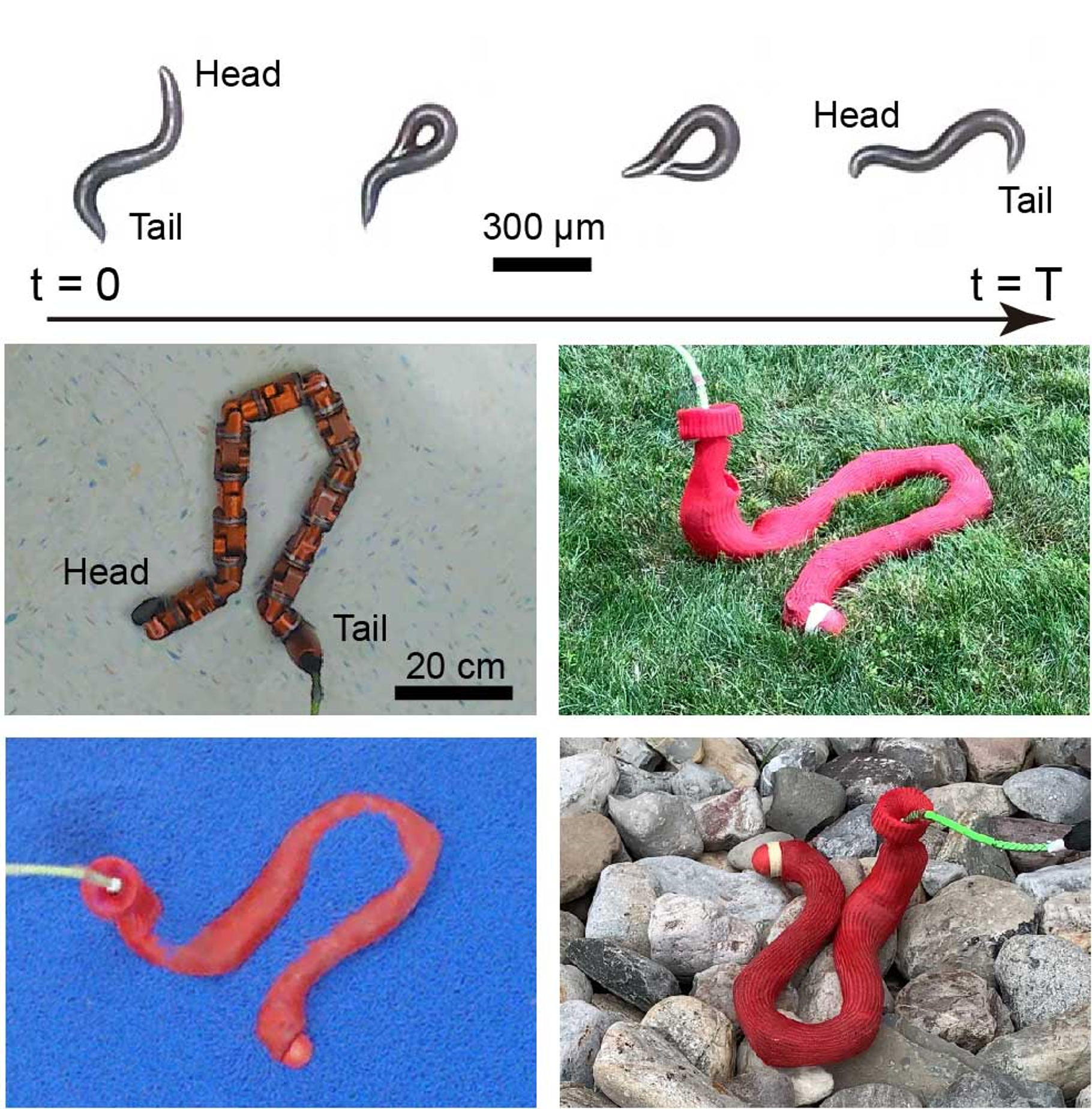
Tianyu Wang*, Baxi Chong*, Yuelin Deng, Ruijie Fu, Howie Choset, Daniel I. Goldman IEEE International Conference on Robotics and Automation (ICRA), 2022 pdf / Tianyu Wang*, Baxi Chong*, Kelimar Diaz, Julian Whitman, Hang Lu, Matthew Travers, Daniel I. Goldman, Howie Choset IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 pdf / Inspired by a behavior observed in the nematode C. elegans, this work proposes a novel in-place turning gait for elongated limbless robots to reorient (turn) effectively within unmodelled and unsensed environments. |
|
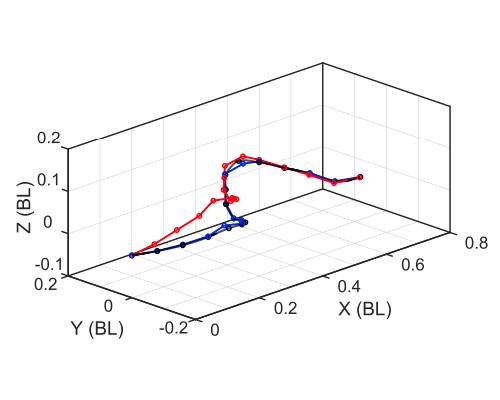
Tianyu Wang*, Bo Lin*, Baxi Chong, Julian Whitman, Matthew Travers, Daniel I. Goldman, Greg Blekherman, Howie Choset IEEE Robotics and Automation Letters (RAL), 2021 pdf / This work proposes a method for articulated robots to reconstruct desired 3D backbone curves by posing an optimization problem that exploits the robot’s geometric structure. |
|
Guillaume Sartoretti, Tianyu Wang, Gabriel Chuang, Qingyang Li, Howie Choset IEEE International Conference on Robotics and Automation (ICRA), 2021 pdf / This work develops a bi-stable dynamical system that relies on inertial feedback to continuously steer a snake robot toward a desired direction, and an onboard vision system that allows the robot to autonomously select its own direction of travel. |
|
Baxi Chong*, Tianyu Wang*, Jennifer Rieser, Bo Lin, Abdul Kaba, Grigoriy Blekherman, Howie Choset, Daniel I. Goldman The International Journal of Robotics Research (IJRR), 2021 pdf / Baxi Chong, Tianyu Wang, Jennifer Rieser, Abdul Kaba, Howie Choset, Daniel I. Goldman Robotics: Science and Systems (RSS), 2020 presentation / pdf / video / This work proposes a method to stabilize limbless robot sidewinding gaits by modulations of the spatial frequency of the vertical wave. |

|
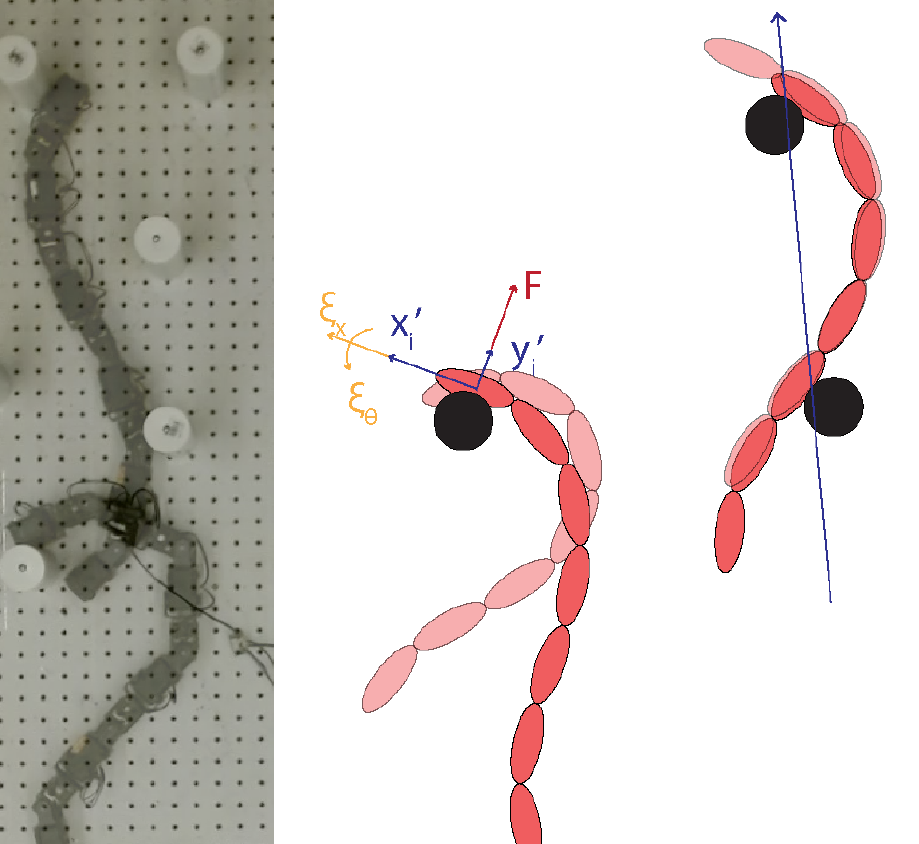
Tianyu Wang, Julian Whitman, Matthew Travers, Howie Choset American Control Conference (ACC), 2020 presentation / arxiv / pdf / video / This work develops a biologically-inspired "directional compliant" controller, which modulates the effective stiffness of the robot body upon collisions, to enable snake robots to reliably traverse difficult 2D and 3D terrains. |

|
Tianyu Wang*, Lisen Ge*, Guoying Gu Sensors and Actuators A: Physical, 2018 pdf / video 1 / video 2 / Lisen Ge*, Tianyu Wang*, Ningbin Zhang, Guoying Gu Journal of Visualized Experiments, 2018 pdf / This work proposes a programmable design of enable pneu-net actuators to achieve 3D coupled bending and twisting complex motions. |
|
|